Build a vehicle for all your tools: change it in seconds
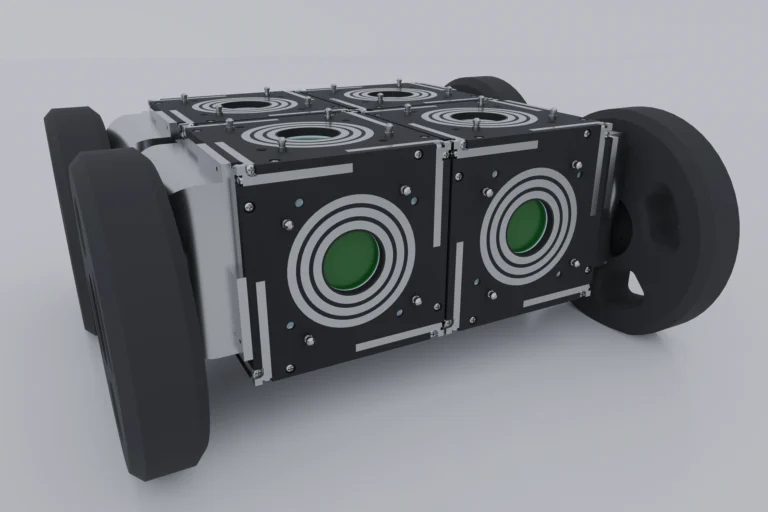
We make unmanned vehicles where absolutely everything is plug-and-play, from deep sea to space, so even a specialised ground vehicle can evolve into an aerial one in the same day.
Does integration always take longer than the actual mission?
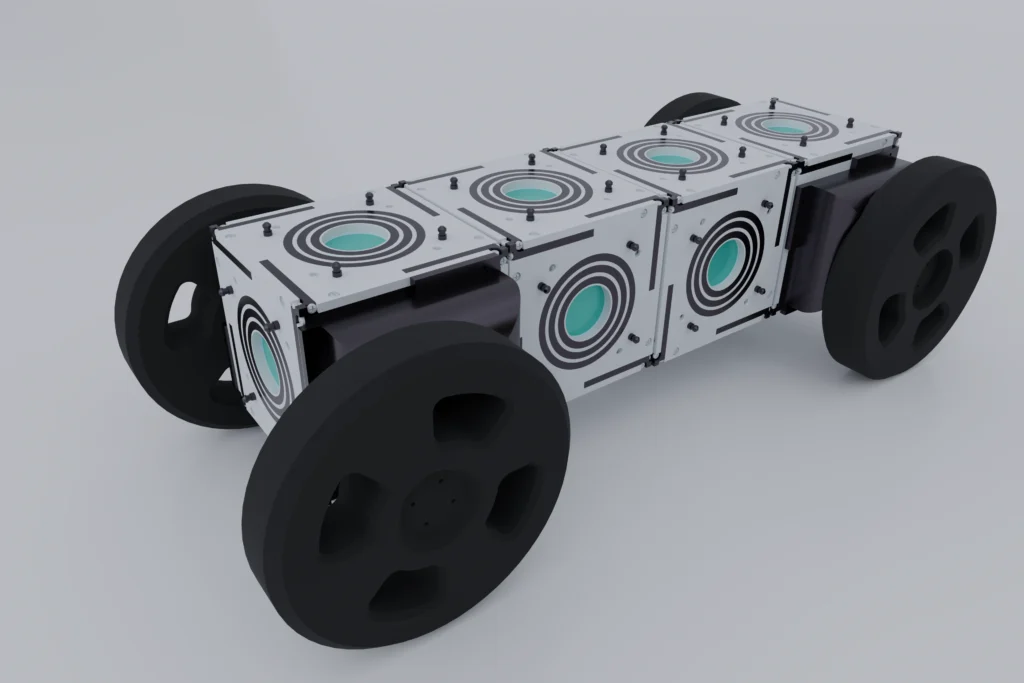
Meet the Omnid
A new UXV standard that evolves:
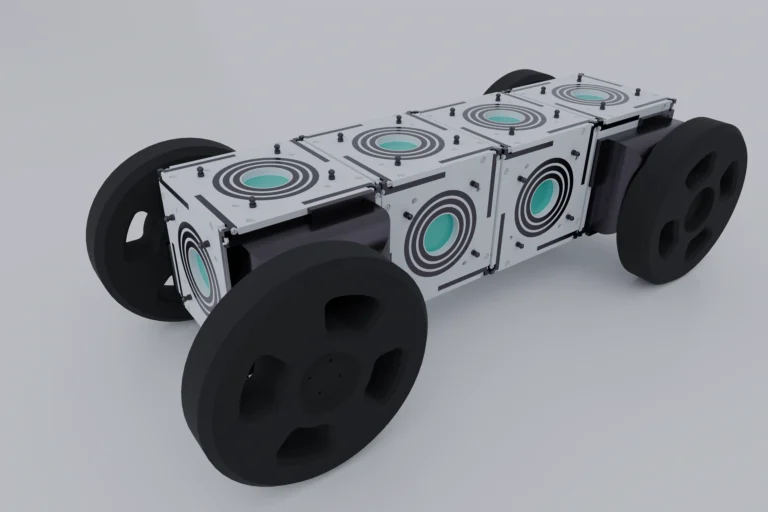
Infinitely reconfigurable
Requires no interpreters, wrappers or glue code
Plug-and-play functionality
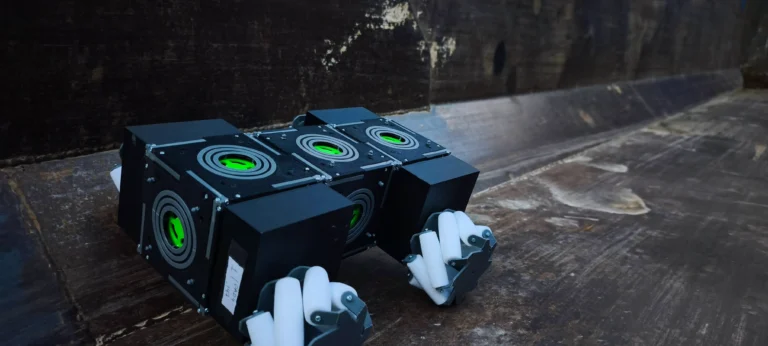
A living BUS that grows in real time with new segments
Fleet level consistency
Zero down-time maintenance
Grows with the mission
Our tech stems from space solutions, where we kept seeing the same recurring issues and realised they weren’t exclusive to the space sector. From there, we created a new architecture: one that standardises the constants while making the variables modular.